概要
本ツール「World Reconstruction From Inconsistent Views」は、ビデオ拡散モデルから3Dの世界を再構築する革新的な手法を提供します。
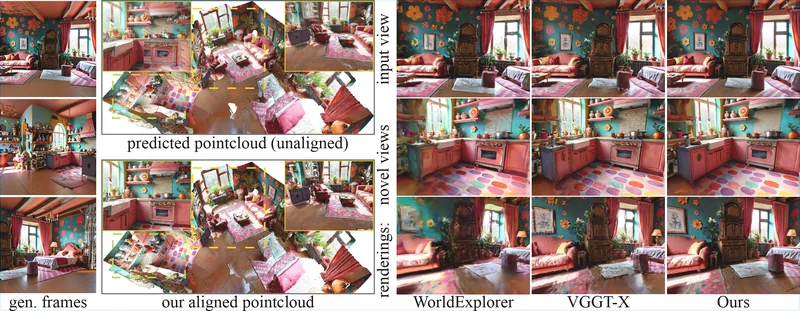
生成される映像シーケンスに内在する3Dの不整合を、非剛体アライメント技術を用いて効果的に解決するのが最大の特徴です。
DepthAnything-3やGaussian Splattingといった最新の技術を統合し、単一のMP4動画やフレーム画像から高品質な3Dシーンを構築できます。
高速な「fast」モードと詳細な「extensive」モードがあり、ユーザーはニーズに応じて選択可能です。
3D再構築、コンピュータビジョン、機械学習分野の研究者や開発者、特にビデオからの3Dコンテンツ生成に関心のあるPython環境の熟練ユーザーを主なターゲットとしています。
互換性・特徴
- Python
- CLI
- GPU必須
- conda
- 3D再構築
- PyTorch
基本情報
| ライセンス | MIT |
| Stars | 258 |
| Forks | 23 |
| カテゴリ | 3D / NeRF |
| アクティビティ | mid |
最新のissue
- ego-vehicle のマスキング方法 (更新: 2026-04-09 / How to mask ego-vehicle ?)
- public dataset 使用時の OOM について (更新: 2026-03-28 / OOM with public dataset)