概要
HexySARは、洞窟での捜索救助活動のために開発されたAI搭載の六足歩行ロボットシステムです。
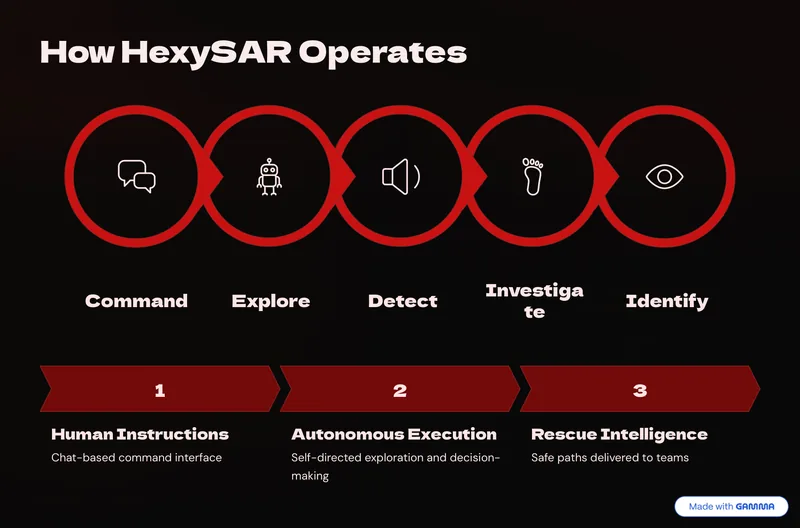
危険な洞窟環境にロボットを先行投入することで、救助者のリスクを低減し、生存者をより迅速に発見することを目的としています。
主要な特徴として、MuJoCoによるロボットシミュレーション、視覚AI(Grounding DINO)と聴覚AI(faster-whisper)を組み合わせた生存者検出機能、マルチモーダルな推論を行うQwen、そしてオペレーターが高レベルな指示を出せるWebコントロールインターフェースを備えています。
想定ユーザーは、捜索救助活動を行うチームや、危険な場所での探索作業を遠隔で行いたい方々です。
システムはローカル実行向けに構築されており、モデルの実行には数GBのRAMとVRAMが必要です。
互換性・特徴
- AI搭載
- ロボット
- 捜索救助
- シミュレーション
- Web UI
- Python
- GPU必須
- ローカル実行
基本情報
| Stars | 3 |
| Forks | 1 |
| カテゴリ | ASR / 音声認識 |
| アクティビティ | low |