概要
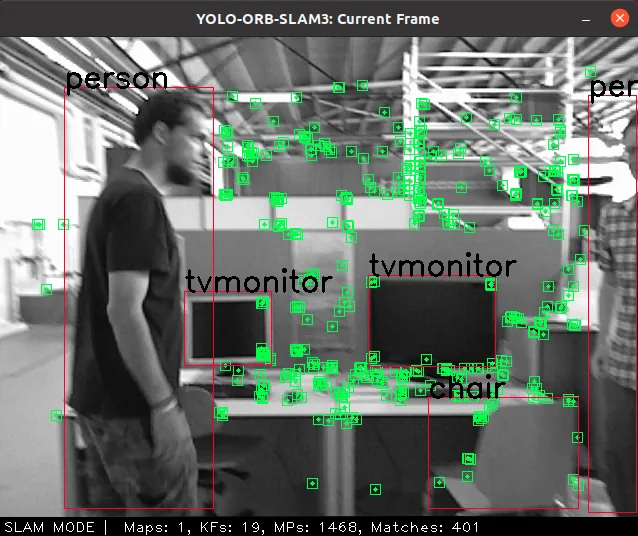
このプロジェクトは、YOLOv5とORB-SLAM3を組み合わせることで、高動的な交通シーンにおける視覚SLAM(Simultaneous Localization and Mapping)の定位精度を大幅に向上させるシステムです。
路面上の歩行者や車両などの動的物体をYOLOv5で検出し、それらの特徴点をORB-SLAM3のトラッキングから除外することで、位置推定のドリフトや消失を解決します。
これにより、自動運転や屋外ロボットナビゲーションなどの分野で、安定したカメラ軌跡と高精度な三次元密点群の出力を可能にします。
主に自動運転、ロボットナビゲーション、3Dシーン再構成、視覚SLAMの研究開発に携わるユーザーを対象としています。
互換性・特徴
- Python
- C++
- CLI
- ROS
- GPU必須
- 学術研究
基本情報
| Stars | 1 |
| カテゴリ | 3D / NeRF |
| アクティビティ | low |
GitHub: https://github.com/xiaofuqing13/yolov5-orbslam3-dynamic-scene