概要
MBA-SLAMは、TPAMI 2025で発表された、モーションブラーを意識したDense Visual SLAMシステムです。
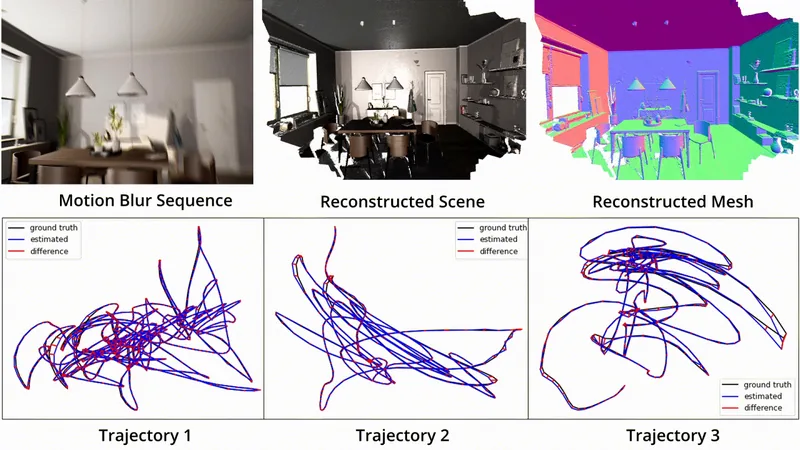
動きによってぼやけた画像と深度データから、露出時間内の局所的なカメラの動きの軌跡を正確に推定し、高品質な3Dシーンを復元します。
Radiance Fields表現を用いており、専用のトラッカーがカメラモーションを、マッパーが仮想的なシャープ画像を生成することで、困難な条件下でも高精度な結果を実現します。
NVIDIA GPUとCUDAを必須とし、PythonベースのCLIツールとして提供され、CondaまたはDocker環境で簡単にセットアップできます。
SLAM、3D再構築、コンピュータービジョンの研究者や開発者に特に有用です。
互換性・特徴
- GPU必須
- CUDA必須
- Python
- CLI
- Docker対応
- 3D再構築
基本情報
| ライセンス | Apache-2.0 |
| Stars | 76 |
| Forks | 2 |
| カテゴリ | 3D / NeRF |
| アクティビティ | low |
最新のissue
- 3DGSバージョンコードのリリース時期について (更新: 2026-03-29 / When to relase 3DGS version code?)
- 素晴らしい仕事です!コードのオープンソース化を楽しみにしています。 (更新: 2025-09-02 / 非常棒的工作!期待大佬开源代码)
- コードのリリース計画に関するお問い合わせ (更新: 2025-07-16 / When to release code?)
- 入力センサーの実装と機能拡張について (更新: 2024-11-21 / Input sensors)
- コードリリースのご希望と現状確認 (更新: 2024-11-18 / Code release!)