概要
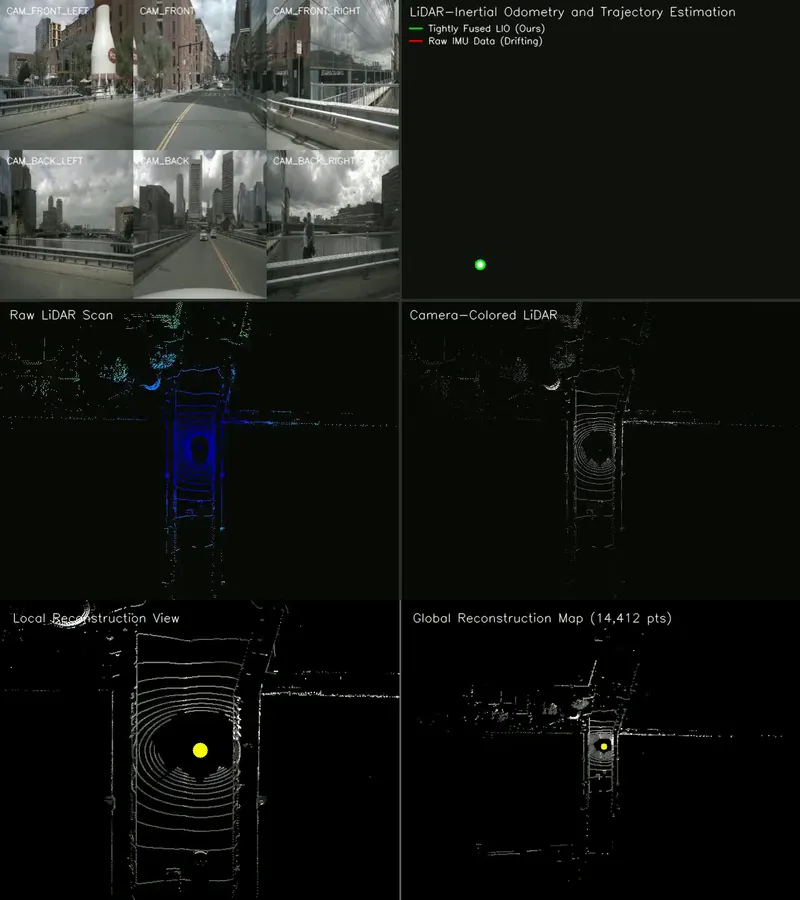
このプロジェクトは、CARLAシミュレーションデータを使用して、同期されたマルチカメラRGB、LiDAR、IMUセンサーフュージョンを行うマルチモーダル知覚パイプラインを構築します。
LiDAR-慣性オドメトリと15状態の誤差状態カルマンフィルター(ESKF)を実装し、動的オブジェクトを除去することで、ゴーストトレイルを低減したRGB着色の静的ワールド3D再構築を生成します。
主な機能には、Open3D、OpenCV、PyTorch、YOLOベースのセグメンテーションを用いたエンドツーエンドのパイプライン、点群へのICPとIMU伝播によるLiDAR-慣性オドメトリ、インスタンスセグメンテーションによる動的オブジェクト除去、静止車両の保持などが含まれます。
自動運転技術の研究者や開発者、特にCARLAシミュレーション環境での3D再構築やセンサーフュージョンに関心のあるユーザーに最適です。
互換性・特徴
- Python
- CARLA
- PyTorch
- LiDAR
- IMU
- 3D再構築
基本情報
| Stars | 2 |
| カテゴリ | 3D / NeRF |
| アクティビティ | low |
GitHub: https://github.com/adityapatel149/rgb-lidar-imu-3d-reconstruction