概要
このプロジェクトは、既存の3Dパノプティックシーンセグメンテーション手法が持つ高コストな最適化や入力制約といった課題を解決します。
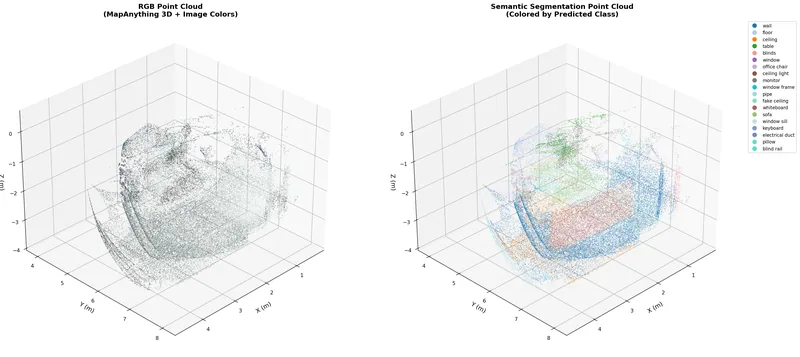
MapAnything 3D再構築バックボーンとカスタマイズされたMask2Formerヘッドを組み合わせることで、多視点に一貫したパノプティックセグメンテーションを実現する統一されたフィードフォワードモデルを提案しています。
これにより、屋内ロボットナビゲーション向けの、特徴豊富で高精度なセマンティックマップを、ポーズ入力や高価なテスト時最適化なしで提供します。
ScanNet++データセットで評価されており、統一アーキテクチャ、多視点の一貫性、効率的なフィードフォワード処理が特徴です。
主にコンピュータビジョン分野の研究者や、3Dセグメンテーションを用いた屋内ロボット開発者が対象です。
互換性・特徴
- 3D再構築
- セマンティックセグメンテーション
- 屋内ロボットナビゲーション
- Python
- コンピュータビジョン
- 研究プロジェクト
基本情報
| ライセンス | Apache-2.0 |
| Stars | 1 |
| カテゴリ | 3D / NeRF |
| アクティビティ | low |