概要
GaussianCaRは、自律走行車向けの効率的なカメラとレーダー融合技術です。
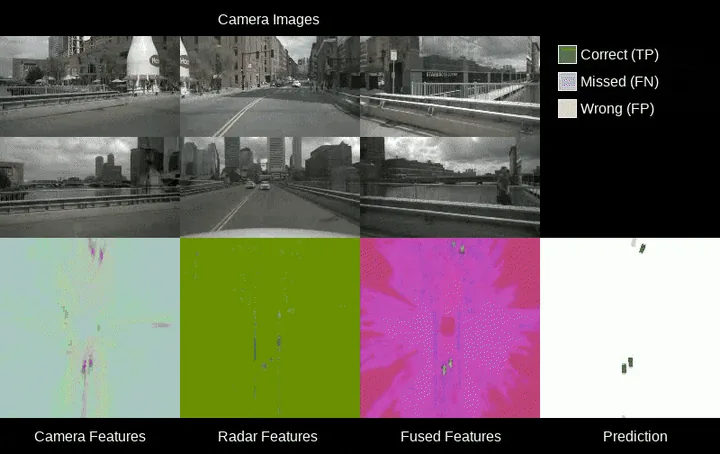
このツールは、Gaussian Splattingをユニバーサルビュー変換器として再利用し、画像ピクセルとレーダーポイントを共通の鳥瞰図(BEV)表現にマッピングすることで、動的オブジェクトやマップ要素のロバストかつ正確な認識を可能にします。
エンドツーエンドのネットワークとして、生センサー情報を潜在特徴に効率的に融合し、最先端のBEVセグメンテーション性能を、従来の融合手法と比較して3.2倍高速な推論実行時間で実現します。
自律走行車のセンサー融合の効率と精度向上を目指す研究者や開発者、特にディープラーニングを用いた高度な知覚システムに関心のあるユーザーに最適です。
互換性・特徴
- Python
- PyTorch
- ディープラーニング
- 自律走行
- GPU必須
- Docker
基本情報
| ライセンス | Apache-2.0 |
| Stars | 44 |
| Forks | 2 |
| カテゴリ | 3D / NeRF |
| アクティビティ | low |
最新リリース: v1.0.0 – ICRA 2026 Code Release (2026-04-24)