概要
「Hyper Diffusion Planner」は、ディフュージョンモデルを自動運転システムのエンドツーエンドプランナーとして活用するための公式実装です。
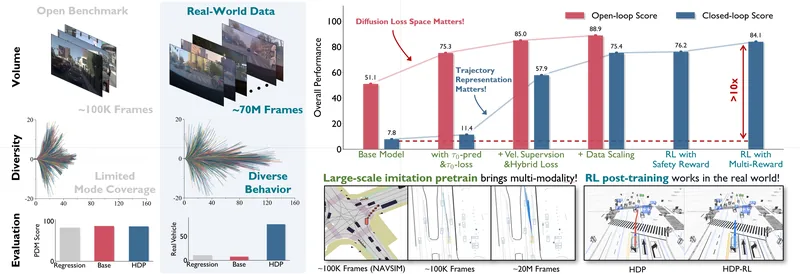
複雑な実世界シナリオにおいて、ディフュージョンモデルが効果的かつスケーラブルな計画能力を持つことを示しています。
本プロジェクトは、NAVSIMやNuPlanといった主要な自動運転ベンチマーク向けの実装詳細をコミュニティに提供し、研究を促進することを目的としています。
実世界の車両実験から派生した設計が特徴で、ディフュージョン損失空間の柔軟なサポートやハイブリッドプランニング損失などの技術革新が含まれています。
想定ユーザーは、自動運転、AIプランニング、またはディフュージョンモデルの研究開発に携わるエンジニアや研究者です。
互換性・特徴
- Python
- 自動運転
- ディープラーニング
- NuPlan
- NAVSIM
- 研究用途
基本情報
| Stars | 129 |
| Forks | 17 |
| カテゴリ | 画像生成 |
| アクティビティ | mid |
GitHub: https://github.com/ZhengYinan-AIR/Hyper-Diffusion-Planner