概要
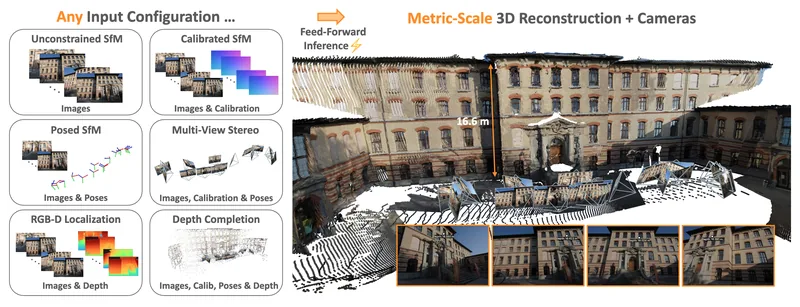
MapAnythingは、画像、キャリブレーション、ポーズ、深度などの多様な入力から、統一されたフィードフォワードのトランスフォーマーモデルを用いて、シーンのメートル単位3Dジオメトリを直接再構築するオープンソースの研究フレームワークです。
マルチイメージsfm、マルチビューステレオ、単眼深度推定など、12以上の3D再構築タスクを単一モデルでこなす汎用性が特徴です。
データ処理から学習、推論、プロファイリングまで一貫したスタックを提供し、モジュール設計により様々な3Dモデルを統合できます。
主に3D再構築の研究者や開発者が、多機能で効率的な3Dシーン理解のソリューションを求める際に想定されます。
互換性・特徴
- Python
- GPU必須
- Web UI
- Hugging Face
- CLI
- 3D再構築
基本情報
| ライセンス | Apache-2.0 |
| Stars | 3,510 |
| Forks | 267 |
| カテゴリ | 3D / NeRF |
| アクティビティ | high |
最新のissue
- torch hubからのdinov2ウェイトの強制ダウンロードについて (更新: 2026-04-24 / Forced weight download for dinov2 from torch hub)
- ASEデータセットに関するWAI形式への変換について (更新: 2026-03-23 / WAI conversion about the ase dataset)
- 容量の大きなglbファイルの取り扱いに関する問題 (更新: 2026-03-23 / large glb file)
- 入力幾何学的パラメータの設定方法に関する質問 (更新: 2026-03-23 / A question about input geometric parameters)
- Nice point maps. Yet, deceiving point map reprojection consistency. (更新: 2026-02-28)
最新リリース: v1.1.2 (2026-05-30)