概要
PerceptPickは、ICRA 2026で発表された、ロボットの物体把持の成功に6Dポーズ推定と3D再構成のエラーがどのように影響するかを評価するための物理シミュレーションフレームワークです。
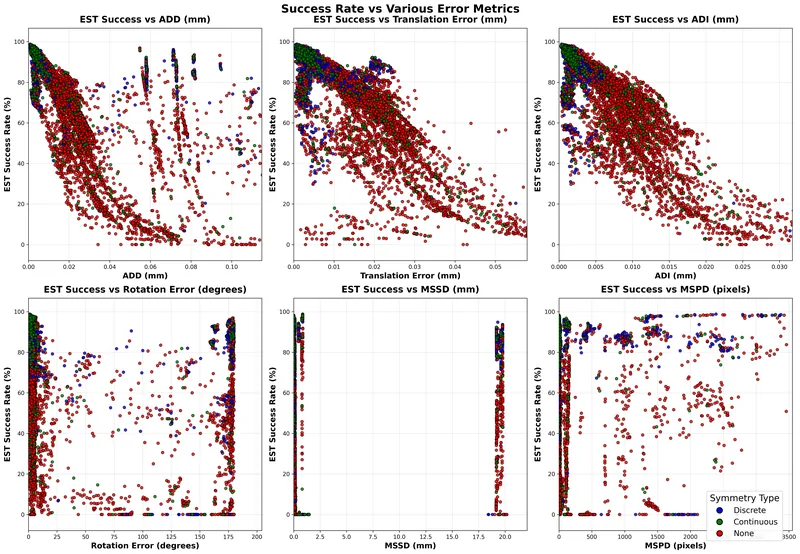
このツールは、従来の幾何学的評価指標では捉えきれなかった、現実世界でのロボット把持の成否を数百万回のシミュレーションを通じて分析します。
9種類のグリッパーと21種類のオブジェクト、複数の再構成・ポーズ推定手法を組み合わせた結果、把持成功にはメッシュ品質よりもポーズ精度が支配的であることを発見しました。
ロボット工学やコンピュータビジョンの研究者が、より実践的なロボット把持戦略や認識システムの開発に役立てることを想定しています。
互換性・特徴
- Python
- 物理シミュレーション
- ロボット
- 研究/ベンチマーク
- GPU必須
- CLI
基本情報
| ライセンス | MIT |
| Stars | 1 |
| カテゴリ | 3D / NeRF |
| アクティビティ | low |