概要
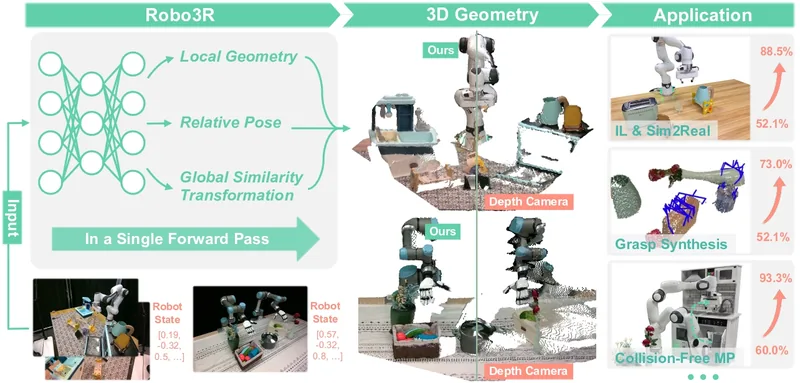
Robo3Rは、RGBフレームからリアルタイムで操作可能な3D再構築を可能にするツールです。
深度センサーやキャリブレーションが不要で、ロボットの規範的なフレーム内で正確な測定スケールの3Dジオメトリを実現します。
これにより、模倣学習、シム・トゥ・リアル転送、把持合成、衝突のない動作計画といったロボット操作のタスクにおいて、精度と堅牢性が向上します。
ロボットによる高精度な操作を必要とする研究者や開発者、特に深度センサーの制約をなくしたいと考えるユーザーを想定しています。
互換性・特徴
- Python
- CLI
- Robotics
- 3D Reconstruction
- Deep Learning
- Computer Vision
基本情報
| ライセンス | Apache-2.0 |
| Stars | 62 |
| Forks | 1 |
| カテゴリ | 3D / NeRF |
| アクティビティ | low |