概要
TGS-SLAMは、IEEE Robotics and Automation Letters (RA-L) に採択されたセマンティックRGB-D SLAMシステムです。
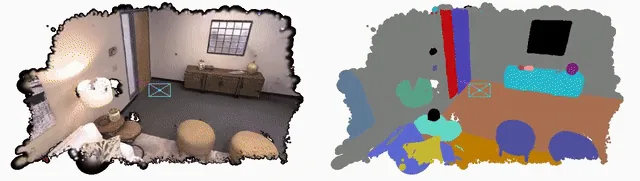
本システムは、3D Gaussian Splattingでジオメトリと外観を固定し、TriDSと呼ばれる独自のtri-planeフィールドでセマンティクスを効率的にエンコードします。
これにより、従来のシステムに比べてセマンティックパラメータを約100分の1に削減しながら、Replicaデータセットで97.0%という高いmIoUを達成し、幾何学的にもセマンティックにも一貫した高精度な3Dマップ構築を可能にします。
ナビゲーション、AR/VR、ロボット操作などの下流タスク向けに、精度の高いセマンティック3Dマップを必要とする研究者や開発者が主なターゲットユーザーです。
互換性・特徴
- GPU必須
- Python
- CLI
- PyTorch
- SLAM
- 3D Gaussian Splatting
基本情報
| Stars | 2 |
| カテゴリ | 3D / NeRF |
| アクティビティ | low |