概要
このツールは、Oxford Spires Datasetを用いて、SLAM(自己位置推定と環境地図作成)、NeRF(Neural Radiance Fields)などの3D再構築、およびローカライゼーション手法を評価するためのスクリプト群です。
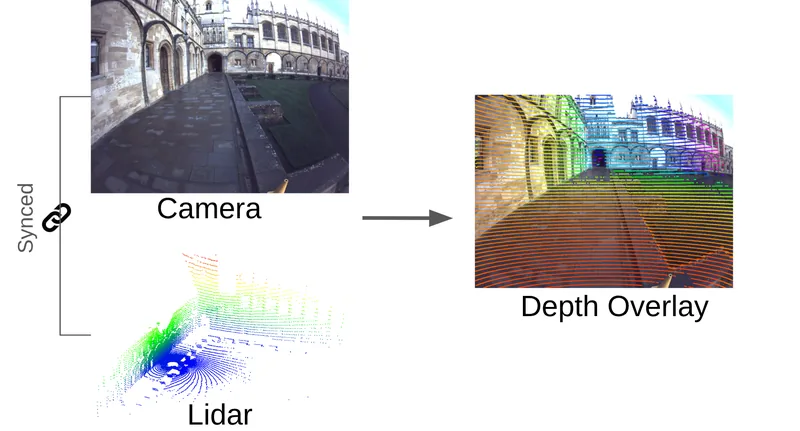
Lidarとビジュアルデータ、そして高精度な3Dマップのグラウンドトゥルースが提供され、研究者や開発者が先進的なロボット工学やコンピュータビジョンアルゴリズムの性能を検証する際に役立ちます。
PythonツールとC++/Pythonバインディングが提供され、データセットのダウンロードから深度画像の生成まで、評価ワークフローをサポートします。
互換性・特徴
- データセット
- Lidar
- 3D再構築
- SLAM
- Python
- Docker
- 研究者向け
基本情報
| ライセンス | NOASSERTION |
| Stars | 160 |
| Forks | 5 |
| カテゴリ | 3D / NeRF |
| アクティビティ | mid |
最新のissue
- e57スキャンフレームとmerged-cloud-1cmのglobal/viewpointの不一致 (更新: 2026-05-12 / Discrepancy of global/viewpoint of e57 scan frames and merged-cloud-1cm?)
- Oxford Spires Datasetにおけるground truthの誤り (更新: 2026-05-09 / incorrect ground truth on Oxford Spires Dataset)
- 2024-03-12-keble-college-02シーケンスでの軽微なLiDARタイムスタンプエラー (更新: 2026-01-08 / Minor LiDAR timestamp error on 2024-03-12-keble-college-02 sequence)